Industrial Robot Pick/Place Workcell
| Status | Duration | Organization | Restrictions | Press Coverage | Website |
|---|---|---|---|---|---|
| Complete | July 2022 - January 2024 | Charge Robotics | Password protected | NEWSWIRE, Solar Construction | chargerobotics |
A robot workcell to pick, place, and fasten brackets for mounting solar modules on tracker assemblies.
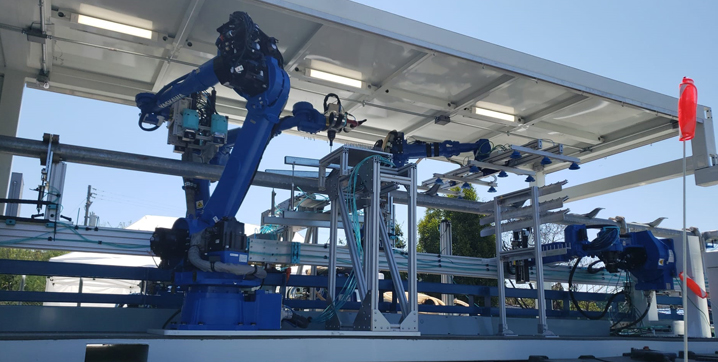
This is a fairly typical industrial robot workcell, with the caveat that it had to be installed in a mobile “microfactory” outdoors on a construction site. The goal is to pick various types of stamped metal brackets from a bin sitting just outside the factory, bring them into the factory, place them on a torque tube, and fasten them to the assembly.
I did every aspect of the project, from conception through deployment, including:
We used Yaskawa for all robots in the microfactory because they were the only industrial robot supplier that had acceptably short lead times and was reasonably affordable. We stuck to the GP (General Purpose) series of 6-DOF robots for consistency and flexibility. I chose the Yaskawa GP35L Robot for this workcell because it had one of the longest reaches of the GP-series, and a sufficient payload capacity for the expected weight of the End-Effector and parts it would need to carry, yet was still compact enough to fit in the microfactory without interfering with nearby equipment or other robots.
There were three types of stamped steel brackets used to mount solar modules to torque tubes: Bearing Housing Assemblies (BHAs), Stamped Shared Rails (SSRs), and a third proprietary to Charge Robotics. However, because they all interface with the same mounting holes of the solar modules, which are standardized, they have common features, namely flat surfaces that are 400mm apart and higher than any other part of the bracket. I chose to use pairs of switchable magnets as the “gripper” for this robot, because they can theoretically pick any type of solar module mounting bracket by attaching to these common flat surfaces. Being switchable not only lowers power consumption relative to electromagnets, but is also a crucial safety feature, since the magnets will maintain their grip on the part even if electrical power or pneumatic pressure is lost. Finally, I integrated inductive sensors to detect the magnet states.
The BHAs are fastened to the assembly with two U-Bolts, and each U-Bolt has two nuts that must be tightened. I used two pairs of pneumatic nutrunners, arranged such that they would align with all four nuts while the EOAT is gripping the BHA, and spring-loaded to rundown the nuts on the U-Bolts.
The EOAT included two inductive sensors for each magnet (to detect each state: on or off). All 8 inductive sensors were connected to an IO-Link expansion hubIO-Link hub. There was also a pressure sensor, distance sensor, and camera. The latter two sensors were SensorPart brand All sensors were connected to an IO-Link Master, which communicated with a host computer via TCP/IP.
The host computer commanded the robot arm via the Yaskawa TCP/IP API, which allows sending movement commands as if the robot was reading them from a program on the teach pendant. The host software, written in python, ran through the state machine to pick and place brackets, adjusting target poses based on camera detections of the bracket bins and assembly mount holes. I also wrote an auto-calibration program to generate a set of poses for the robot to look at a calibration plate, so that camera extrinsics (the pose of the camera relative to the Tool Center Point (TCP), could be calculated.
In addition to building the station, I also managed logistics for deploying it, and most of the other robot stations, to a pilot project, a real solar construction site in the US SouthWest. This involved gathering tools and spare parts for repairs, creating an inventory, getting suitable totes and packaging materials, and organizing everything prior to shipping out.